
Berhem



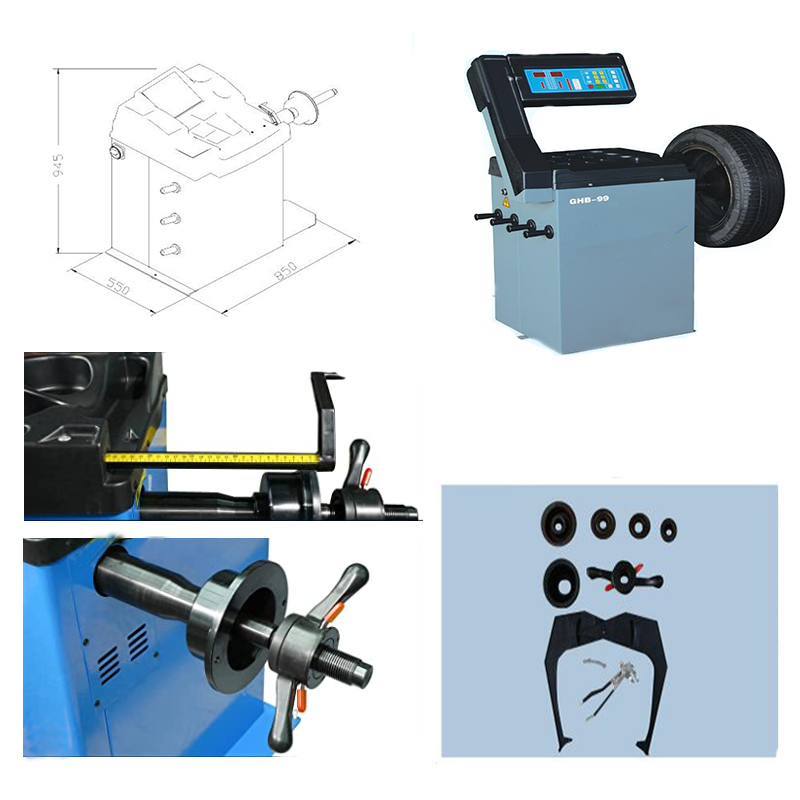
Balansa Çerxên Wesayîtê ya Nîv Otomatîk
Taybetî
1. Pîvandina dûriyê;
2. Kalibrasyona xweser; Dîmendera dîjîtal a LED
3. Fonksiyona optimîzasyona nehevsengiyê;
4.Adaptora bijarte ji bo hevsengiya çerxa motorsîkletê;
5. Pîvan bi înç an mîlîmetreyan, xwendin bi gram an oz;
Taybetmendî
| Hêza motorê | 0.25kw/0.35kw |
| Navê min | 110V/240V/240V, 1ph, 50/60hz |
| Qûtra çemberê | 254-615mm/10”-24” |
| Firehiya çemberê | 40-510mm”/1.5”-20” |
| Giraniya herî zêde ya tekerê | 65 kg |
| Mezintirîn diametera tekerê | 37"/940mm |
| Rastbûna hevsengiyê | ±1g |
| Leza hevsengiyê | 200rpm |
| Asta deng | <70dB |
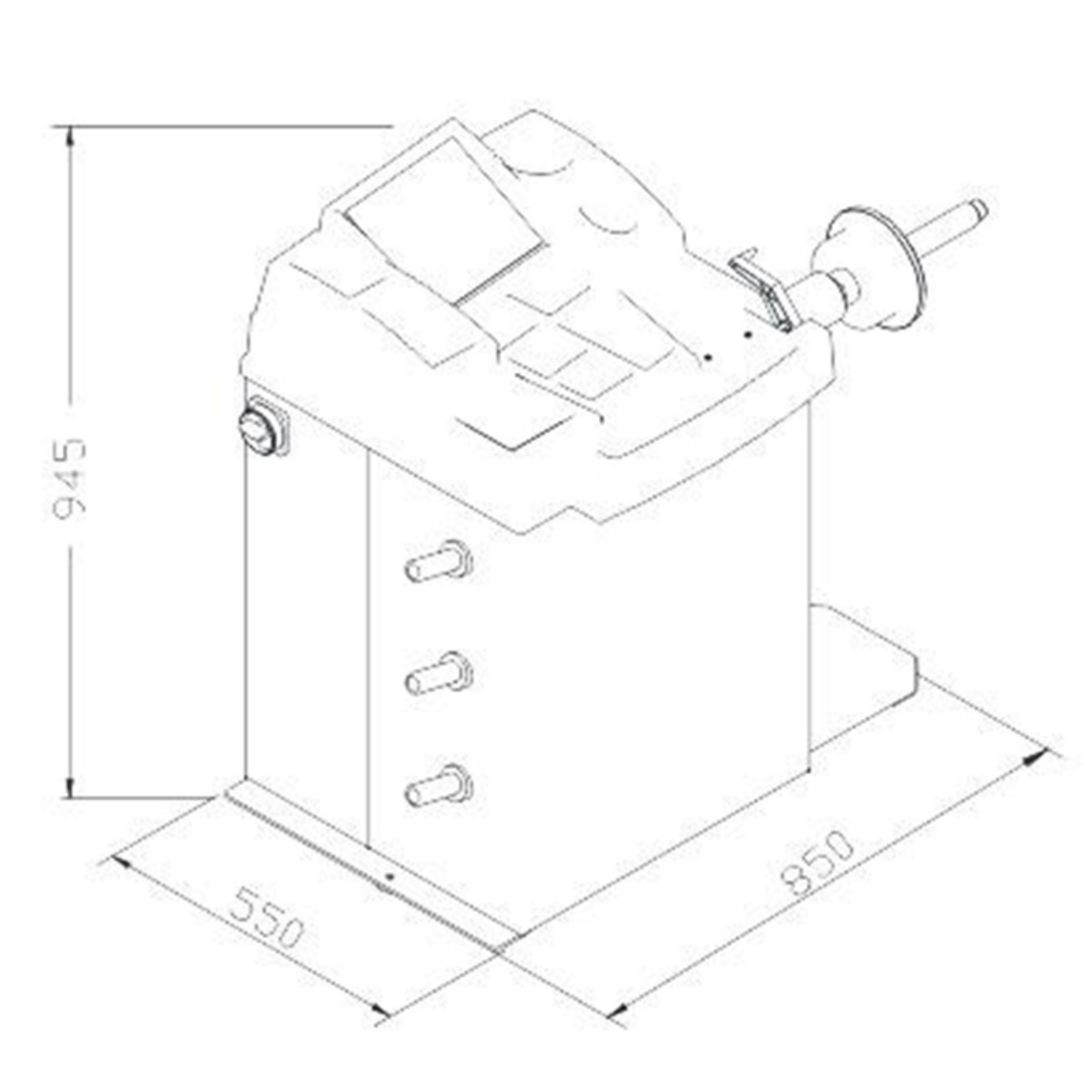
| Pîvan | 134 kg |
| Mezinahiya pakêtê | 980*750*1120mm |
Xet
Kengê hevsengkirina tekeran pêwîst e?
Heta ku lastîk û çerx bi hev re werin civandin, komek sererastkirinên hevsengiya dînamîk hewce ne. Çi ji bo guheztina çerxê be, çi jî ji bo guheztina lastîka kevin bi ya nû be, her çend tiştek neyê guhertin jî, lastîk ji çerxê tê derxistin da ku were kontrol kirin. Heta ku çerx û lastîk ji hev cuda werin civandin, hevsengiya dînamîk hewce ye.
Ji bilî guhertina çerx û lastîkan, divê hûn di demên asayî de jî bêtir baldar bin. Ger hûn bibînin ku dîreksiyon dihejîne, divê hûn pêşî kontrol bikin ka hevsengiya dînamîk ne normal e an na. Wekî din, faktorên wekî deformasyona çerxê, tamîrkirina lastîkan, sazkirina modula çavdêriya zexta lastîkan, û guheztina valfên ji materyalên cûda dê bandorê li hevsengiya dînamîk bikin. Tête pêşniyar kirin ku setek hevsengiya dînamîk were kirin da ku karanîna normal a çerxê were misoger kirin.
Kategoriyên berheman
-

Parkkirina Hîdrolîk a Erdê ya Biçûk...
-

Asansorê Otomobîlê yê Asta Duqat Asansorê Wesayîta Bin erdê
-

Rakirina Rasterast a Otomatîk a Vertikal a Pîşesaziyê ...
-

Asansorê Parkkirina Otomobîlan a Asta Duqat a 1 Stûnî ya Hîdrolîk
-

Asansorê Parkkirina Otomobîlan a Tilt 2 Post ji bo Jêrzemînê
-

Guherker û Alîkarê Lastîkên Otomatîk ên Kamyonan